Das Projekt zielt auf den Aufbau eines robotergestützten Überwachungsnetzes ab, das Umweltmessungen in der Atmosphäre, an Land und in angrenzenden Gewässern umfasst. In jedem dieser Bereiche werden umwelt- und landwirtschaftlich relevante Parameter mit spezifischen Sensorsystemen gemessen (Abbildung 1). Durch die Kombination lokaler land- und seegestützter Roboternetzwerke mit Fernerkundungsdaten (aus dem Weltraum und aus der Luft), Wetterdaten sowie Datenbanken, die bereits bei lokalen/regionalen Behörden und Nichtregierungsorganisationen vorhanden sind, wird das geplante intelligente Beobachtungssystem eine ganzheitliche Echtzeitüberwachung und -vorhersage des Umweltzustands (Gesundheit des Ökosystems) entlang der Übergangsregionen zwischen Atmosphäre und Land und Meer ermöglichen.
Basierend auf den bereits bestehenden Errungenschaften früherer Projekte wie ROBEX, ARCHES, AHEAD und weiteren, intern finanzierten Aktivitäten innerhalb der POF V, widmet sich das iFOODis-Konsortium der Herausforderung, wie eine hochautomatisierte, kontinuierliche und synoptische Umweltüberwachung in der Atmosphäre, auf dem Land und im Oberflächenwasser erreicht werden kann, die die Entwicklung von landwirtschaftlichen und ökologischen Managementoptionen für eine nachhaltige landwirtschaftliche Nahrungsmittelproduktion ermöglicht. In wissenschaftlicher Hinsicht werden die Robotikfähigkeiten im anwendungsbezogenen Bereich stark verbessert werden. Darüber hinaus sind hier Forschungsfelder wie Umweltwahrnehmung mit gleichzeitiger Lokalisierung, Multi-Agenten- und Multi-Aktionsplanung sowie intelligente Datenerfassung, -interpretation und -verwaltung von großer Bedeutung.

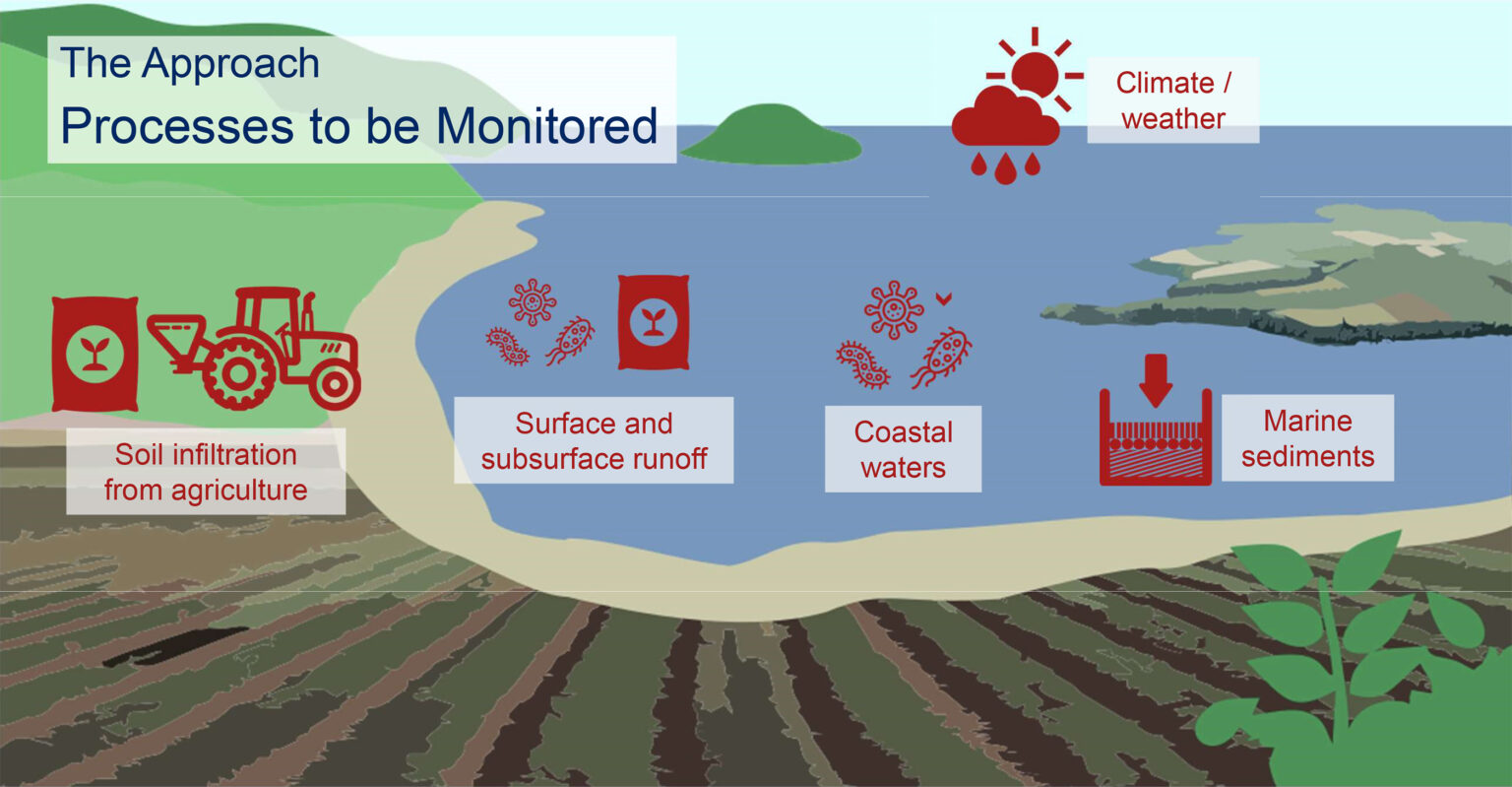

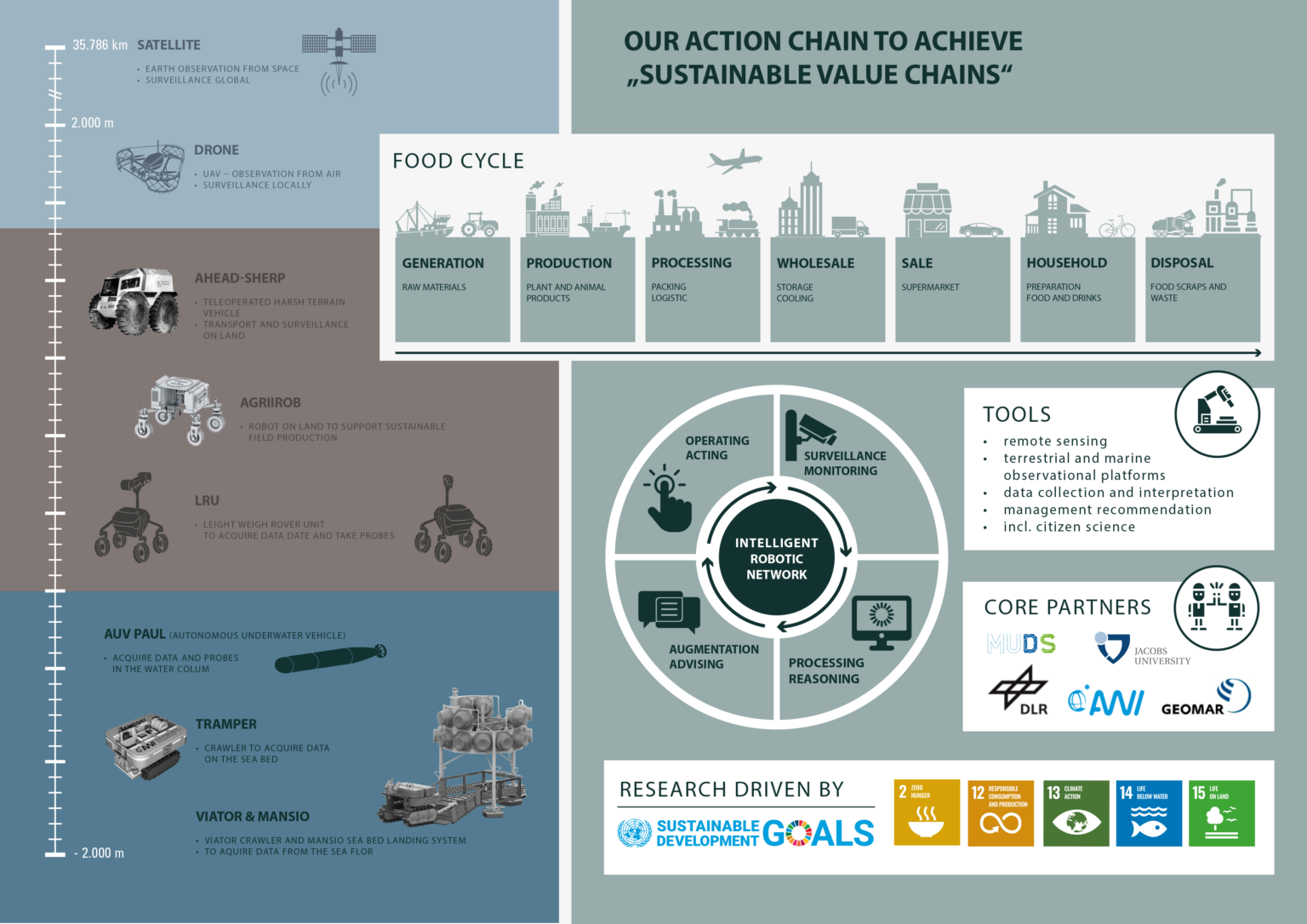
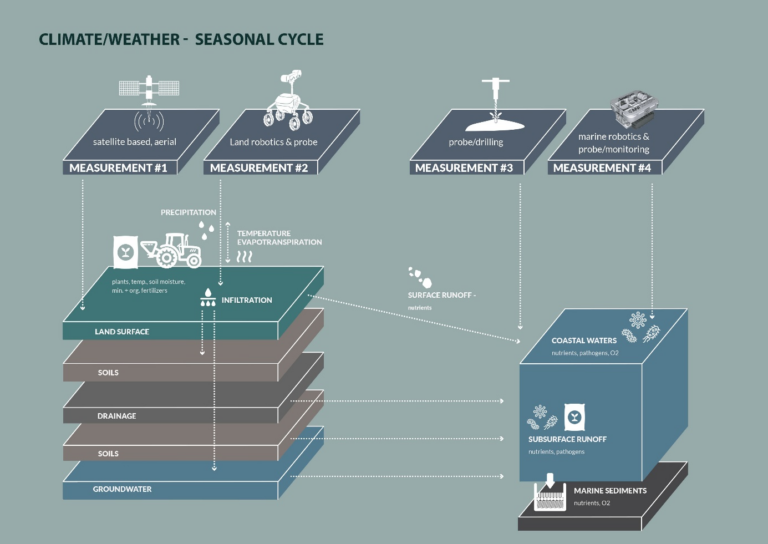
Abbildung 2: Erstens: Piktogramm des „intelligenten Roboternetzes“ iFOODis zur verbesserten Beobachtung des Lebensmittelkreislaufs aus den Sphären Luft, Erde und Wasser.
Das intelligente Roboternetz erfasst und kombiniert Daten in Echtzeit, um das Bewusstsein und das Prozesswissen zu erhöhen. Zweitens: Anzeige des relevanten Prozesses und der zu erfassenden Informationen, um eine „nachhaltige Wertschöpfungskette“ des Ökosystems Landwirtschaft vorherzusagen.

Einsatz von Oberflächen- und Meeresrobotern zur Sammlung spezifischer fehlender
Informationen, die durch die Analyse externer und satellitengestützter Daten ermittelt wurden
Die Technologien und Methoden werden im Rahmen des iFOODis-Backbone-Projekts entwickelt, während ihre Anwendung und Umsetzung in den Teilprojekten I-III erfolgt (Abbildung 1). Der Hauptschwerpunkt von iFOODis liegt, wie oben formuliert, im Teilprojekt I. Da die benötigten grundlegenden Robotertechnologien (die im Backbone-Projekt enthalten sind) auch für die Anwendungsfälle II und III geeignet sind, erwarten wir ein erhöhtes Potenzial für Ausgründungen und Technologietransfer in diese Märkte.
Ziel von iFOODis ist es, fortschrittliche Technologien zu entwickeln und zu demonstrieren, die zur Lösung von Problemen im Zusammenhang mit der Nachhaltigkeit des Lebensmittelkreislaufs beitragen. Die Neuartigkeit des Projekts liegt in der Integration verschiedener Roboter- und Messsysteme, Fachkenntnisse und Forschungsmethoden, die zum Erbe mehrerer Partnerinstitute gehören, in ein effektives kooperatives Netz von Agenten, deren Schwerpunkt auf der verteilten und zeiteffizienten Erfassung, Messung und Vorhersage relevanter Parameter liegt.
Zu den Vorteilen eines solchen großen und heterogenen Netzes von Agenten gehört die Möglichkeit, verteilte Messungen über eine Vielzahl von metrischen Skalen durchzuführen. Ein vernetztes Team von Robotern kann lokale Bodeneigenschaften wie Verdichtung und Erosion sowie die Konzentration von Nährstoffen, Kohlenstoff und Phosphor, die Indikatoren für Qualität und Fruchtbarkeit sind, messen. In größerem Maßstab werden Satellitenbeobachtungen, die die Nutzung und Veränderung des Bodens überwachen, sowie Überwachungsdienste wie der Dürremonitor des UFZ Informationen in Form von räumlichen und zeitlichen Messungen liefern. Diese werden verwendet, um Detektoren und Klassifikatoren für Anomalien und Schwankungen der charakteristischen Eigenschaften des Bodens zu trainieren und sie vorherzusagen, um eine rechtzeitige Reaktion auf Krisensituationen zu ermöglichen. In diesem Projekt wird daher ein multimodaler Ansatz entwickelt, der verschiedene Überwachungsdatenquellen zusammenführt, um eine bessere Situationsbeurteilung zu ermöglichen, aufkommende Anomalien frühzeitig zu erkennen und Entscheidungsträger besser zu unterstützen.
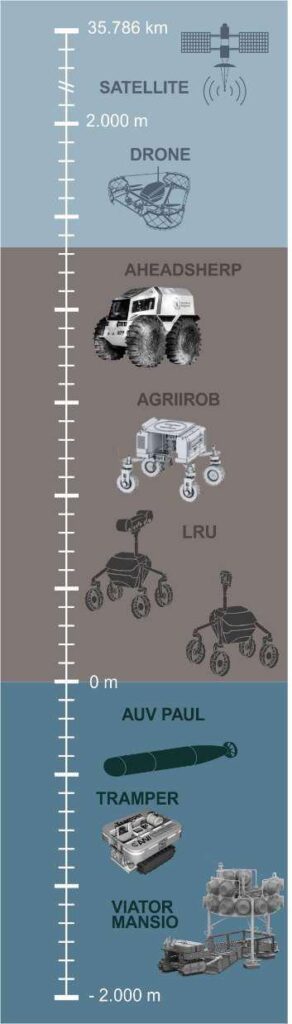
Die Stärke des iFOODis-Projekts liegt in der engen Verbindung mit dem Erbe und dem Fachwissen der Partnerinstitute, zu denen Roboter- und Messsysteme gehören, die für die Navigation und das Handeln in entlegenen und gefährlichen Umgebungen (z. B. im Weltraum) entwickelt wurden. Ein komplexes Team heterogener Fahrzeuge, bestehend aus UAVs (ARDEA) und Rovern auf Rädern mit unterschiedlichen Spezialisierungen und Größen (LRU, LRU2, SCOUT, SHERP), wird dank fortgeschrittener Wahrnehmungsfähigkeiten und Verständnis der Umgebung hochgradig autonom agieren, um Daten zu messen und zu erfassen, die zur Ergänzung bestehender Datenbanken benötigt werden. Je nach der Notwendigkeit, bestimmte fehlende Informationen zu sammeln, die durch die Analyse externer und satellitengestützter Daten ermittelt wurden, wird sich das Roverteam zu den Zielorten begeben und eine Vielzahl von Messinstrumenten wie Multispektral- und Wärmebildkameras und In-situ-Spektrometer (RAMAN, LIBS) mitführen. Laserspektroskopische Techniken wie LIBS (Laser-induzierte Breakdown-Spektroskopie) und Raman-Spektroskopie können eingesetzt werden, um Elementinformationen und strukturelle Informationen über Mineralien und Moleküle im Boden zu erhalten. Bei der LIBS- und Raman-Spektroskopie wird Laserstrahlung auf die Oberfläche der Probe gelenkt und das anschließend emittierte bzw. gestreute Licht analysiert. Die Probe kann in ihrer natürlichen Form nur mit optischem Zugang analysiert werden. LIBS ist empfindlich für Haupt-, Neben- und Spurenelemente und kann für die Analyse des Bodens verwendet werden
In der Regel bezieht sich die Küstenüberwachung auf ausgewählte Stationen entlang der Küste, die ein breites Spektrum an unterschiedlichen Umweltlebensräumen abdecken. Eine hohe zeitliche und räumliche Auflösung wird nicht umgesetzt. Daher werden episodische Ereignisse wie der Nährstoffexport nach starken Niederschlägen (z. B. Beaton et al. 2012; Yücel et al., 2015) oder die Sauerstoffverarmung nicht erfasst, was den Aufbau von Wirkungsketten zwischen Prozessen und Rückkopplungen zwischen Atmosphäre, Land und Oberflächengewässern verhindert. Ein weiteres großes Manko ist, dass die Überwachung bisher auf die Entnahme einzelner Sediment- und Wasserproben mit Forschungsschiffen beschränkt ist. Oft liegt der Schwerpunkt auf der Wassersäule, während den Prozessen im Sediment weniger Aufmerksamkeit geschenkt wird. Messungen der Stoffflüsse zwischen Atmosphäre, Land, Wassersäule und Sediment fehlen weitgehend. Trotz des großen Aufwands, der bei der Umweltüberwachung betrieben wird, um Zeitreihen z. B. von Nährstoffen und anderen umweltrelevanten Parametern zu erhalten, werden diese oft mit einer erheblichen zeitlichen Verzögerung von Monaten und Jahren analysiert und interpretiert.
iFOODis wird mobile und stationäre Sensorplattformen einsetzen, um räumlich und zeitlich hochaufgelöste Verteilungszeitreihen für die oben genannten Ökosystemdienstleistungen zu erhalten. iFOODis wird auf bereits existierende stationäre (Landerplattformen) und benthische Fahrzeuge (z.B. VIATOR, NOMAD, TRAMPER, DSR PANTA RHEI) zurückgreifen, die teilweise im Rahmen der von der HGF und dem BMBF geförderten Projekte ROBEX, ARCHES, FRAM und MOSES entwickelt wurden. Die Beobachtungstechnik ist jedoch teuer, und ihr Einsatz und ihre Wartung erfordern häufig das Fachwissen von Technikern und Wissenschaftlern. Um eine bessere Zugänglichkeit von Umweltbeobachtungstechnik insbesondere für Flachwasseranwendungen zu ermöglichen, wird iFOODis daher Messpfähle und schwimmende Geräte entwickeln, die die oben genannten wesentlichen Parameter erfassen können.
Um die räumliche Abdeckung zu erhöhen und interaktiv auf Messungen innerhalb des Netzwerks zu reagieren, wird ein spezielles Sensorpaket für den luftgestützten Betrieb mit einer Drohne für erhöhte Nutzlasten entwickelt. Während des Einsatzes wird die Drohne das Sensorpaket zu ausgewählten Stellen entlang der Küstenlinie manövrieren und durch Auf- und Abwärtsbewegungen der Drohne eine vertikale Profilerstellung in der Wassersäule ermöglichen. Alle Geräte, auch die an Land, sind in ein drahtloses Kommunikationsnetz eingebunden, das den Austausch von Befehlen und Daten ermöglicht. Die synoptische Zusammenführung von atmosphärischen, terrestrischen und marinen Daten und ihre zeitnahe semantische Interpretation erfolgt in TT2 und 5 und ist ein wichtiges Ergebnis von iFOODis. Eine solche nicht-invasive Beprobung ist von besonderem Vorteil, da viele Küstengebiete aufgrund ihrer geringen Wassertiefe nicht einmal von konventionellen Forschungsschiffen erreicht werden können, deren Antrieb oft zur Resuspension des Sediments und zu starken Störungen und damit zu Artefakten in den Messungen führt. Unser Ziel ist es daher, die m
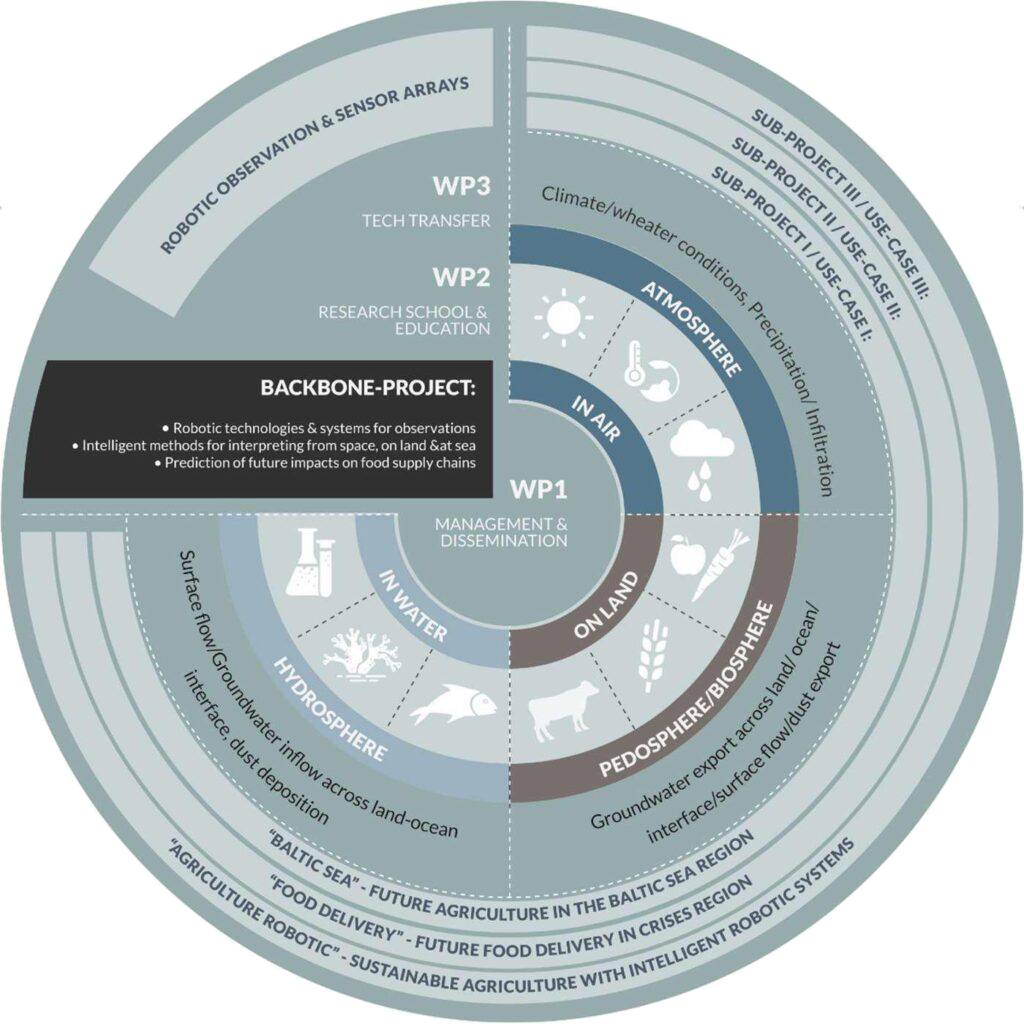
Die Umsetzung und der Transfer von iFOODis gliedert sich in drei Teilprojekte, die auch als Anwendungsbereiche verstanden werden können:
Der Fokus dieser Aktivitäten und der Forschung in diesem Projekt wird hauptsächlich im Use Case Szenario 1 zusammengefasst, während sich das Backbone-Projekt auf die Etablierung einer robotergestützten intelligenten Netzwerkinfrastruktur konzentriert, die für lebensmittelbezogene Überwachungen, Beobachtungen, Vorhersagen, Logistik- und Handhabungsaufgaben genutzt werden soll, um vorausschauend und entschlossen handeln zu können.
Zusammenfassend besteht das iFOODis-Kernprojekt für die nachhaltige Wertschöpfungskette der HGF aus einem zentralen Backbone-Projekt für Organisation, Vernetzung, Transfer und Bildung, das zugleich technologische Grundlagen für zentrale Forschungsfragen beim Einsatz von Robotern in Lebensmittelkreisläufen bereitstellt. Darüber hinaus sind drei konkrete Anwendungsfelder als Teilprojekte integriert, die die Technologiereife untermauern, um dem Technologietransfer gerecht zu werden. Um den Fokus im Projekt zu halten, wird Use Case I als primäre Anwendung für das Projekt ausgewählt.
Die beiden anderen Anwendungsfälle stehen in engem Zusammenhang mit Arbeiten, die einige der Projektpartner bereits im Rahmen anderer Förderungen durchführen, sind aber für die zentrale Aufgabe des iFOODis-Projekts von hoher Relevanz, weshalb sie hier als kleiner Teil als Anwendung aufgenommen werden.
Fall I:
Unsere Küsten, die die gesamte Land-Meer-Übergangszone umfassen, sind zunehmend natürlichen und anthropogenen Bedrohungen ausgesetzt. Die intensive Landwirtschaft verschärft diese Bedrohungen noch, indem sie die Land- und Bodendegradation beschleunigt, Nährstoffe auswäscht und die lokalen Wasserkreisläufe unterbricht. Dies führt zur Eutrophierung und zum Verlust von Sauerstoff in den angrenzenden Küstengewässern. Folglich leiden sowohl die Land- als auch die Meeresteile der Küstenumwelt unter einem fortschreitenden Verlust an biologischer Vielfalt und den damit verbundenen Ökosystemfunktionen und -dienstleistungen. Die Entwicklung und der erste Einsatz dieses Überwachungssystems wird in einer Modellregion an der deutschen Ostsee durchgeführt, die durch eine zunehmend intensive Landwirtschaft gekennzeichnet ist. Im Hinblick auf die Sustainable Development Goals des Entwicklungsprogramms der Vereinten Nationen und des Helsinki-Übereinkommens (HELCOM) zum Schutz der Meeresumwelt der Ostsee vor jeglicher Verschmutzung vom Land, aus der Luft und aus dem Meer sowie zur Erhaltung der biologischen Vielfalt und zur Förderung der nachhaltigen Nutzung der Meeresressourcen werden Steuerungsstrategien entwickelt. Diese Fallstudie zielt auf eine hohe Übertragbarkeit der entwickelten Technologie und des Wissens unter Berücksichtigung lokaler sozioökonomischer und kultureller Gegebenheiten und Interessengruppen ab. Die Entwicklung und der erste Einsatz dieses Monitoringsystems wird in einer Modellregion an der deutschen Ostsee durchgeführt, die durch eine zunehmend intensive Landwirtschaft geprägt ist.
Fall II:
Der zweite Anwendungsfall soll ebenfalls in der deutschen Ostseeregion validiert werden, konzentriert sich jedoch auf den Fernbetrieb von Überwachungs-, Lebensmittel- und Logistiktransportkapazitäten in überschwemmten, rauen und schwer zugänglichen Regionen, in denen die Bedingungen für menschliche Bediener gefährlich sein könnten. Der Bedarf an Lebensmitteltransporten und Lagekenntnissen für Menschen in Not ist durch mehrere Krisen in den letzten Jahren dramatisch gestiegen.
Der Bedarf an Lebensmitteltransporten und Situationskenntnis für Menschen in Not ist durch mehrere Krisen in den letzten Jahren dramatisch gestiegen und wird leider weiter steigen, wie die globalen Trends zeigen, die im „Global Report on Food Crises“ (GRFC 2021) hervorgehoben wurden. Die weltweite Nachfrage wird auf https://hungermap.wfp.org/ visualisiert. Dieser Anwendungsfall adressiert insbesondere den Bedarf in den häufig vernachlässigten Regionen der Dritten Welt, z.B. im Südsudan, wo alljährliche Überschwemmungen große Teile der Gesellschaft von logistischen Netzen abschneiden. Nicht zuletzt würden auch in Katastrophenregionen, wie sie in Deutschland aktuell zu beobachten sind, Notfall-, Überwachungs-, Lebensmittel-, Infrastruktur- und Eilguttransporte eine schnelle Reaktions- und Handlungsfähigkeit ermöglichen.
Fall III:
Ein dritter Anwendungsfall von intelligenten Roboteranlagen und Beobachtungsnetzen ist der Bereich der Landwirtschaft, wo Roboternetzwerke eingesetzt werden können, um Felder individuell zu bewirtschaften und nachhaltiger zu bewirtschaften, als dies mit herkömmlichen Maschinen möglich ist. Da es in diesem Bereich eine hohe Forschungsaktivität gibt, z. B. EU-EIP-Agri, agROBOfood, und Start-ups wie BOSCH-Deepfield bereits auf den Markt drängen, dient dieses Projekt als Netzwerkknotenpunkt, der die Nutzung der generierten Daten auf die Agrarrobotik und auf Spin-in/out-Technologien ausdehnt.