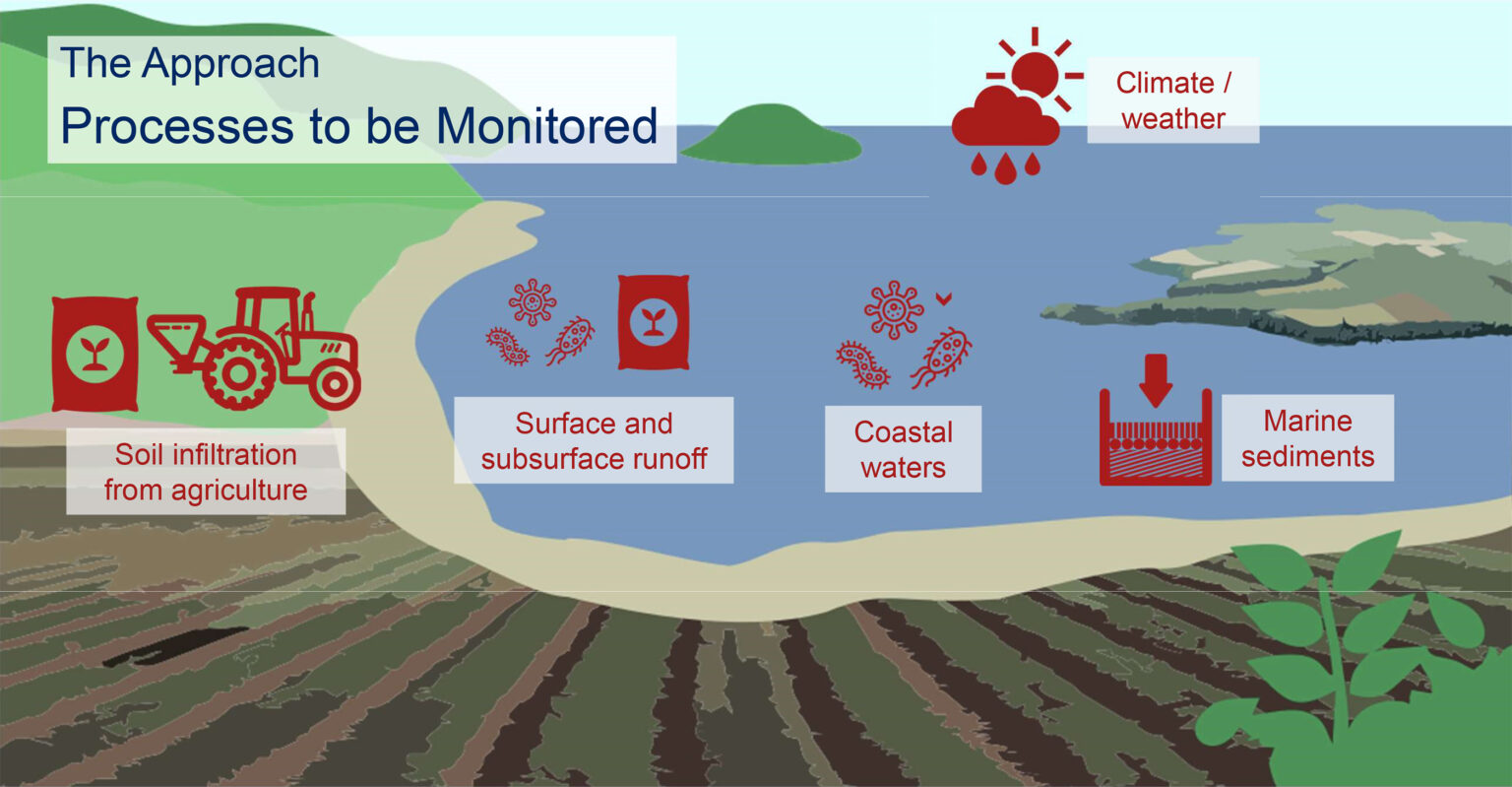
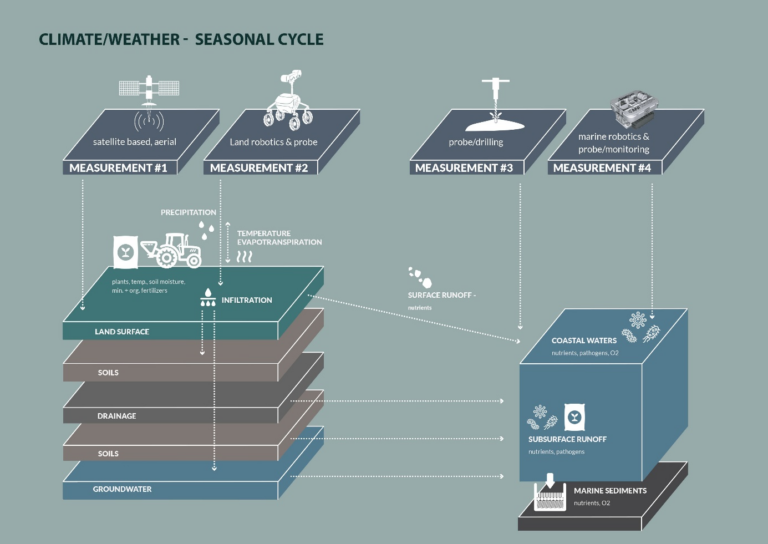
The project aims on the set up of a robotic monitoring network that includes environmental measure- ments in the atmosphere, on land as well as adjacent waterbodies. In each of these compartments environmentally and agriculturally relevant parameters will be measured by specific sensor systems, Figure 1. By combining local land and sea acting robotic networks with remote sensing (space and airborne), weather data, as well as data bases that already exists with local/regional authorities and NGO ś , the envisaged intelligent observation system will allow the holistic real-time monitoring and prediction of the environmental status (ecosystem health) along the atmosphere-land-sea transition regions.
Based on the already existing achievements of prior projects like ROBEX, ARCHES, AHEAD and further including internally funded activities within the POF V, the iFOODis consortium addresses the challenge of how to achieve highly automated, continuous and synoptic environmental surveillance in the atmosphere, on land and surface water enabling the development of agricultural and environmental management options for a sustainable agricultural food production. Scientifically, the robotic capabilities in the application-related domain will be strongly enhanced. Furthermore, research fields such as environmental perception with simultaneous localization, multi-agent and multi-action planning, as well as intelligent data acquisition, interpretation and management are of great importance here.



The technologies and methods are developed within the iFOODis backbone project, whereas their application and implementation will be performed in the sub projects I-III, Figure 1. The major focus of iFOODis as formulated above is located in sub-project I. Knowing that the needed fundamental robotic technologies (included in the backbone project) also apply well to the application case II and III, we expect an increased potential for spin offs and technology transfer into such markets.
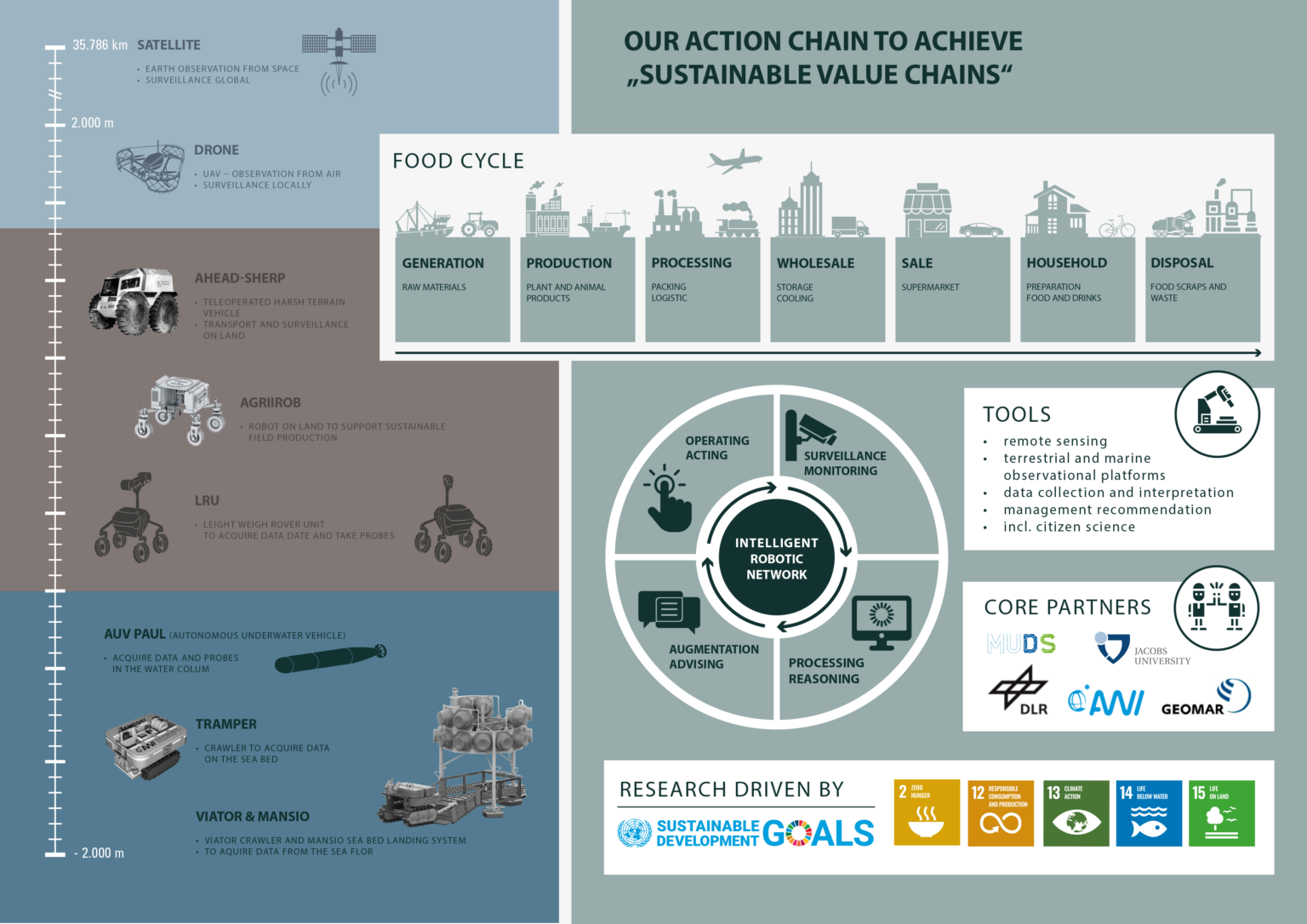
The aim of iFOODis is to develop and demonstrate advanced technology that helps to tackle problems related to the sustainability of the food cycle. The novelty of the project lies in the integration of diverse robotic and measurement systems, expertise and research methodologies, that belong to the heritage of several partner institutes, in an effective cooperative network of agents whose focus is to sense, measure, and predict relevant parameters in a distributed and time effective manner.
Among the benefits of such a large and heterogeneous network of agents, is the possibility of performing distributed measurements across a large variety of metric scales. A networked team of robots allows to measure local properties of the soil, such as compaction, erosion as well as concentration of nutrients, carbon and phosphorus, which are indicators of quality and fertility. On a larger scale, satellite observations, that monitor the exploitation and change of the land, in addition to monitoring services such as the drought monitor from UFZ, will provide information in form of spatial and temporal measurements. These will be used to train detectors and classifiers of anomalies and fluctuations of characteristic properties of the land and predict them to enable a timely response to crisis situations. In this project, a multi-modal approach is therefore developed, that fuses different monitoring data sources to build better situation assessment, early trigger rising anomalies and improve supporting decision makers.
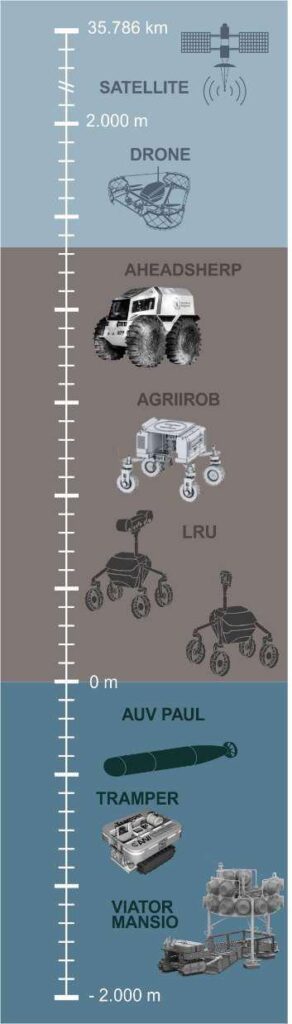
The strength of the iFOODis project is based on the strong connection with the heritage and expertise of the partner institutes, which includes robotic and measurement systems developed to navigate and act in remote and hazardous environments (e.g. space). A complex team of heterogeneous vehicles comprising UAVs (ARDEA) and wheeled rovers with different specializations and sizes (LRU, LRU2, SCOUT, SHERP) will act in a highly autonomous manner, thanks to advanced perception capabilities and understanding of the environment, to measure and acquire data needed to complement existing databases. Following the necessity of collecting specific missing information, determined by the analysis of external and satellite data, the team of rovers will proceed to reach the destinations and carry a variety of measurement instruments such as multi-spectral and thermal cameras and in-situ spectrometers (RAMAN, LIBS). Laser-spectroscopic techniques such as LIBS (laser-induced breakdown spectroscopy) and Raman spectroscopy can be used to obtain elemental information and structural information such as of minerals and molecules present in the ground. LIBS and Raman spectroscopy rely on channeling laser radiation onto the sample’s surface and analyzing subsequently emitted or scattered light, respectively. The sample can be analyzed in its natural form with optical access only. LIBS is sensitive to major, minor and trace elements and can be used to analyze the soil with regard to its nutrient and fertilizer content while Raman spectroscopy can directly sense important structural bonds such as the anionic parts of salts e.g., phosphates or perchlorates. While the focus will be put on the analysis of the soil, it is also foreseen the analysis of parts of plants such as leaves to infer information about plant health and the local situation in which they grow.
The spectral information shall be complemented by close-up context information from an imaging sensor attached to the spectrometer. A simple 2D image obtained by a camera allows the analysis of the sur- face texture in one or more spectral bands (e.g. RGB). Light sources, e.g., LED’s, can be used to learn more about the studied object. 3D information can be gathered by using a stereo system or a light field camera. The third spatial dimension allows the derivation of structural parameters, e.g. roughness, particle size. The close-up context information is of very high relevance for the interpretation of the spectral in-situ data.
In addition, the systems can be used to obtain different types of samples, e.g. soil, stones or plant parts. By using in-situ analyses, samples of interest can be autonomously detected.
These can then be collected autonomously by intelligent robots using a variety of tools. For this, different technologies from perception and knowledge representation to decision making and action execution and monitoring have to work together smoothly.
Success within the iFOODis consortium is foreseen as motivated by the positive outcome and achieve- ments of past and current projects such as ROBEX, ARCHES and AHEAD but also from the internally funded activities as part of the POF V. The successful cooperation between the partners and the devel- oped robotic technologies within these projects assess the strength of the iFOODis consortium in ad- dressing the challenge of how to create sustainable, highly autonomous data collection and ultimately sustainable farming from an agronomic perspective. Particular attention will be put in the export of knowledge and transfer of technology. Several active fields of research will be touched within the project such as multi-modal perception, localization and mapping, multi-agent planning of actions and explora- tion as well as intelligent data acquisition and semantic understanding of the environment.
The methods and technologies will be developed in the context of the iFOODis backbone project. The application and implementation towards the envisioned challenges will be demonstrated in the context of the three sub projects. Specifically, the principal focus of the application of modular and heterogene- ous robotic technologies will be put in the application case I. However, as the developed technologies might be applicable also to cases II and III, and to spin-off markets as well, a strong potential for tech- nology transfer is foreseen.
Typically, coastal monitoring is related to selected stations along the coastline covering a wide range of diverse environmental habitats. High temporal and spatial resolution are not implemented. Hence episodic events such as nutrient export after strong precipitation (e.g. Beaton et al. 2012; Yücel et al., 2015) or oxygen depletion are not captured preventing to establish chains of effects between processes and feedbacks of atmosphere, land and surface waters. Another major drawback is that to date, monitoring is limited to take single sediment and water samples using research vessels. Often the focus is on the water column whereas processes in the sediment receive less attention. Measurements of material fluxes between atmosphere, land, water column and sediment are largely missing. Despite the great effort of environmental monitoring in obtaining time series of e.g. nutrient and other environmentally relevant parameters, often they are analyzed and interpreted with a substantial temporal delay of months and years.
Moving beyond these constraints, iFOODis will implement mobile and stationary sensing platforms to obtain spatially and temporarily high-resolution distribution time-series data to address the ecosystem services given above. iFOODis will make use of already existing stationary (lander platforms) and benthic vehicles (e.g. VIATOR, NOMAD, TRAMPER, DSR PANTA RHEI), which partly have been developed within the framework of the ROBEX, ARCHES, FRAM and MOSES projects funded by the HGF and the BMBF. However, observational technology is expensive, and its deployment and maintenance often require the expertise of technicians and scientists. Hence in order to enable better accessibility of environmental observational technology especially for shallow water applications iFOODis will develop measuring piles and floating devices that are able to record the essential parameters addressed above.
In order to increase spatial coverage and to interactively respond to measurements made within the network, a specific sensor package will be developed for airborne operation using a drone for increased payloads. During deployment, the drone will maneuver the sensor package to selected sites along the shore line and by up-and downward movements of the drone will enable vertical profiling in the water column. All devices including those on land are embedded into a wireless communication network facil- itating the exchange of commands and data. Ultimately, the synoptic fusion of atmospheric, terrestrial and marine data and their timely semantic interpretation takes place in TT2 and 5 and presents a major deliverable of iFOODis. Such a non-invasive sampling is of particular benefit as many coastal areas due to their shallow water depths cannot be reached by conventional even small sized research vessels, where often their propulsion leads to resuspension of the sediment and strong disturbance and hence artefacts in the measurements. Thus, we aim to reduce monitoring costs significantly and allowing for improved transferability of this observation technology to other similar coastal settings globally, incl. specifically development countries. It will allow for a high transferability of technology and knowledge, intelligent data processing and assist guidance for decision makers.
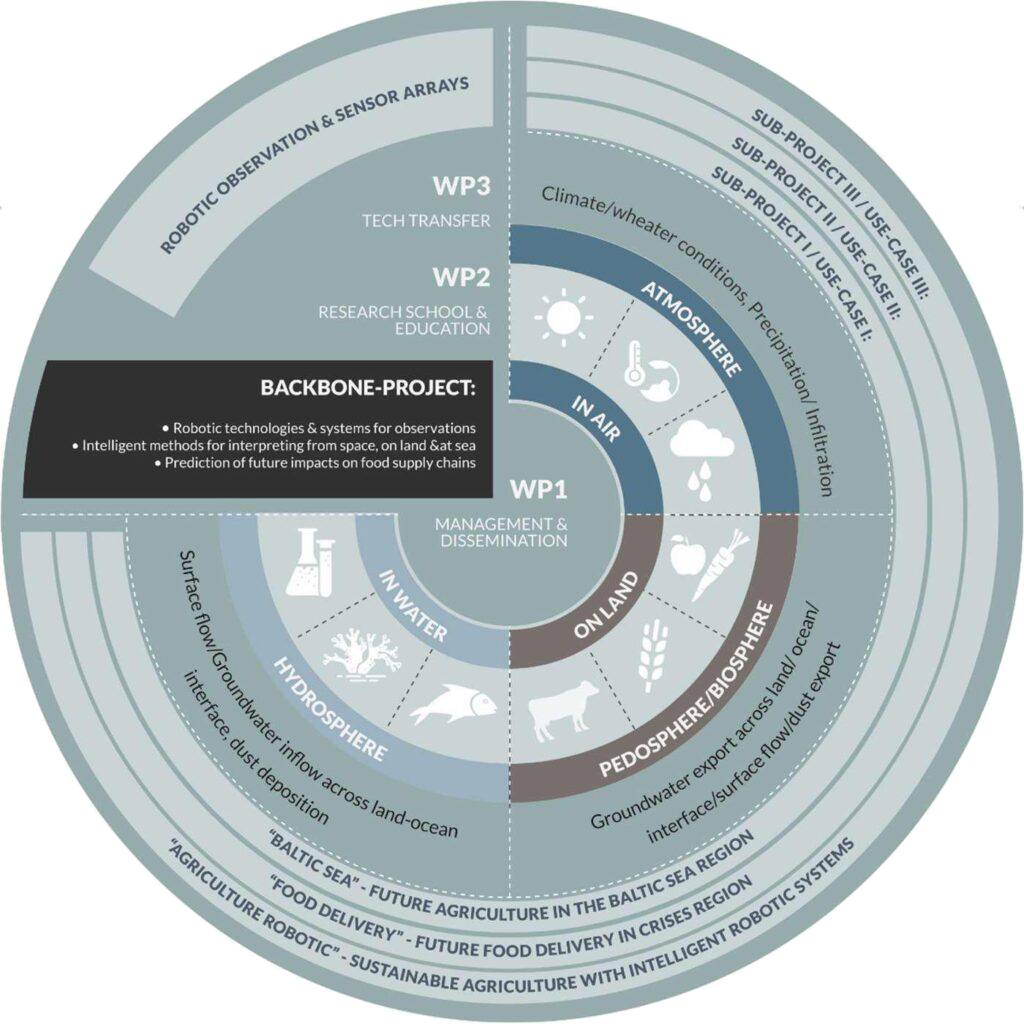
The iFOODis implementation and transfer is structured in three sub-projects, which could be also understood as application areas:
Focus of these activities and the research in this project will be mainly summarized in the Use Case scenario 1, while the backbone project is focusing on the establishment of a robotic intelligent network infrastructure to be used for food supplies related surveillances, observations, predictions, logistics and handlings tasks, to be able to act wisely, with foresight and determination.
In summary, the iFOODis core project for the sustainable value chain call of the HGF consists of a central backbone project for organization, networking, transfer and education, which at the same time provides technological foundations for central research questions in the use of robots in food cycles. In addition, three concrete application fields are integrated as sub-projects, which underpin the technology maturity, in order to do justice to the technology transfer. To keep the focus in the project, Use Case I would be selected as the primary application for the Project.
The other two use cases are closely related to work that some of the project partners are already re- searching through other funding, but are highly relevant to the central task of the iFOODis project, which is why they are included here as a small sub as an application.
Case I:
Our coasts, encompassing the entire land-sea transition zone, face increasing natural and anthropo- genic threats. Intense agriculture further exacerbates them, by accelerating land and soil degradation, nutrient leaching, disrupting local hydrological cycles. This leads to eutrophication and loss of oxygen in adjacent coastal waters. Consequently, both land and marine parts of the coastal environment are suf- fering from a progressive loss of biodiversity and associated ecosystem functions and services. The development and first use of this monitoring system will be conducted in a model region at the German Baltic Sea, which is characterized by an increasingly intensive agriculture. Governance strategies will be developed in view of the Sustainable Development Goals outlined by the United Nations Develop- ment Programme and the Helsinki Convention (HELCOM) on the protection of the Marine Environment of the Baltic Sea from all sources of pollution from land, air and sea as well as on the preservation biological diversity and the promotion of the sustainable use of marine resources. This case study aims on a high transferability of the developed technology and knowledge considering local socio-economic, cultural circumstances and stakeholders. The development and first use of this monitoring system will be conducted in a model region at the German Baltic Sea, which is characterized by an increasingly intensive agriculture.
Case II:
The second use case shall also be validated in the region of the German Baltic Sea, but turns its focus to the remote operation of surveillance, food and logistics transportation capabilities in flooded, harsh, and difficult to reach regions, where conditions could be hazardous to human operators. The demand of food transportation and situational understanding for people in need is dramatically increased by
several crises in the last years and, sadly, will continue to increase as shown by global trends, which has been highlighted in the “Global Report on Food Crises” (GRFC 2021). The worldwide demand is visualized on the https://hungermap.wfp.org/. This application case particularly addresses demand in the frequently ignored third world regions, e.g. South Sudan, where yearly flooding events cut of major parts of the society from logistic networks. Last but not least, also in disaster regions actually seen in Germany, emergency response, surveillance, food, infrastructure and urgent material transportation would allow fast response and handling ability.
Case III:
A third use case of intelligent robotic assets and observation networks is the area of agriculture where robotic networks can be used to individually farm and manage fields in a much more sustainable way than conventional machinery allows. Since there is high research activity in this domain, e.g. EU-EIP- Agri, agROBOfood, and start-ups like BOSCH-Deepfield are already entering the market, this project serves as a network hub extending the usage of generated data to agriculture robotics and to spin in/out technologies.